|
seeria
|
Mudel/tüüp
|
Sümbol
|
Funktsiooni kirjeldus
|
Pneumaatiline kinnitus
|
Tegevuse omadus
|
Tüüpilised stsenaariumid
|
|
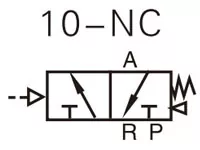
3A-seeria (3/2 Way)
|
10-NC (tavaliselt suletud)
|
|
Piloot VÄLJAS: P→ A
Piloot VÄLJAS: A →R (väljalasketoru)
|
see eemaldab elektrimähise ja hoiab alles ainult peamise klapi korpust.
3A210-06/08 : PC -02(G1/4)X2 tükk,vaikus G1/4 X1 tükk
3A310-08/10 : PC -03(G3/8)X2 tükk,vaikus G3/8 X1 tükk
3A410-15: PC -04(G1/2)X2 tükk,vaikus G1/2 X1 tükk
|
Kevadine tagasitulek:
NC/NO lüliti: rakendub õhusignaali olemasolul; lähtestub vedru jõul, kui signaal eemaldatakse.
|
Ühetoimeliste silindrite juhtimine
• Õhupuhumis-/jahutussüsteemid: puhuge, kui signaal on, peatage, kui signaali pole
• Ohutusväljalülitusahelad (tõrkekindlad)
Kui signaaliallikas kaob, lülitage gaasiahel kohe välja.
|
|
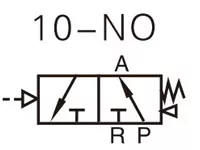
10-EI (tavaliselt avatud)
|
|
Piloot SEES: A→ R (väljalasketoru)
Piloot VÄLJAS: P→ A
|
|
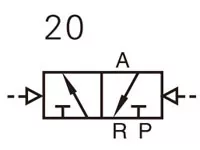
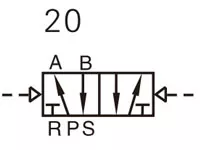
20 (kahepiloot)
|
|
1. signaal: Piloot SEES: P →A
Piloot SEES: A→ R (väljalasketoru)
Signaal 2: Piloot SEES: A → R (väljalasketoru)
Piloot VÄLJAS: P→ A (õhk sisse)
|
|
Mälu / bistabiilne
Mälufunktsioon: klapp jääb viimati lülitatud asendisse isegi siis, kui signaal eemaldatakse. Lähtestamiseks on vaja vastusignaali.
|
Pneumaatilised loogikaahelad (mitteelektrilised)
• Signaali hoidmise süsteemid
• Punkri värava juhtimine (avamine/hoia/sulgemine)
|
|
4A-seeria (5/2-suunaline)
|
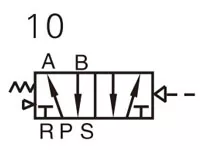
10 (ükspiloot)
|
|
Piloot SEES: P → B, A → R
Piloot VÄLJAS: P → A, B → S
|
4A110-M5/ 06: PC -01(G1/8)X3 tükk, vaikus G1/8 X2 tükk
4A430CEP-15: PC -04 (G1/2)X3 tükk, vaikus G1/2 X2 tükk
4A310-08/10 : PC -03(G3/8)X3 tükk, vaikus G1/4X2 tükk
4A410-15: PC -04(G1/2)X3 tükk,vaikus G1/2 X2 tükk
|
kevadine tagasitulek
Standardne suunajuhtimine: silinder ulatub välja koos signaaliga; tõmbub automaatselt tagasi, kui signaal peatub.
|
Kahepoolse toimega silindrite juhtimine
• Automaatsed pressimismasinad: töötaja astub signaali andmiseks pneumaatilisele jalgventiilile ja silinder surub alla; Vabastage jalg, silinder põrkub automaatselt tagasi
• Pneumaatilised turvauksed: uks avaneb gaasisignaali korral ja sulgub automaatselt, kui signaali pole.
|
|
20 (kahepiloot)
|
|
Signaali pole: kõik pordid on suletud (A/B blokeeritud)
Signaal2: P → B, A → R
|
|
Mälu / bistabiilne
Impulsi juhtimine: asendi vahetamiseks ja hoidmiseks on vaja ainult lühikest õhuimpulssi. Ideaalne signaali pikamaa edastamiseks.
|
Pikad konveierisüsteemid
• Kinnitusseadmed, mis nõuavad väljalülitusmälu
• Pööramismehhanism: kui silinder on jõudnud lõppasendisse, jääb see paigale ilma maha kukkumata isegi siis, kui signaaliallikas on ära lõigatud
|
|
4A-seeria (5/3 Way)
|
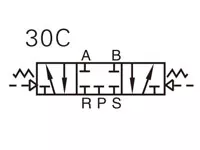
30C (suletud keskus)
|
|
Signaal 1: P → A ,B→ S
Signaal 1: P → A ,B→ S
Signaal 2: P → B,A→ R
|
4A130CEP-M5/ 06: PC -01(G1/8)X3 tükk,vaikus G1/8 X2 tükk
4A230CEP-06/08 : PC -02(G1/4)X3 tükk,vaikus G1/8 X2 tükk
4A330CEP-08/10: PC -03(G3/8)X3 tükk, vaikus G1/4X2 tükk
4A110-M5/ 06: PC -01(G1/8)X3 tükk, vaikus G1/8 X2 tükk
|
Peata ja hoia
Silinder peatub kohe oma praeguses asendis (toimib nagu pidur).
|
Hädapeatused
• Vertikaalne tõstmine (kukkumiste vältimine)
• Positsioneerimine löögi keskel
|
|
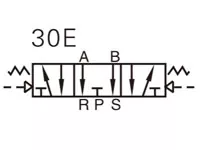
30E (väljalaskekeskus)
|
|
Signaali puudub: A → R, B → S (kurnav)
Signaal 1: P → A,B→ S
Signaal 2: P → B,A→ R
|
Vaba Liikumine
Kolb kaotab rõhu ja seda saab käsitsi liigutada.
|
Käsitsi seadistamine/silumine: kui masin on seisatud, peab operaator silindrit käsitsi liigutama, et reguleerida joondust või vahetada vorme.
• Ohutusväljalülitusahelad (tõrkekindlad)
• "Ujuvad" rakendused: järelmehhanism: kasutatakse siis, kui silinder peab vabalt liikuma ja järgima välist jõudu.
|
|
|
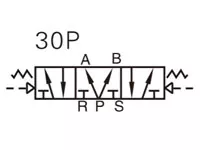
30P (rõhukeskus)
|
|
Signaali puudub: P → A, B (rõhu all)
Signaal 1: P → A,B→ S
Signaal 2: P → B,A→ R
|
Tasakaalustada/pikendada
Säilitab rõhu tasakaalu (Märkus: ühe vardaga silindrid ulatuvad aeglaselt välja; kui tegemist on kahe vardaga silindriga, jääb see jõuga tasakaalustatud olekusse.).
|
Rõhu tasakaalustamise süsteemid
• Sissetõmbamise vältimine teatud vertikaalsete seadistuste korral (harvem): kui silinder paigaldatakse vertikaalselt, varras on allapoole, kasutab silinder raskusjõu neutraliseerimiseks ja tagasitõmbamise vältimiseks diferentsiaalala jõudu.
|
















 rahvusvaheline tööstusnäitus")


